Gazebo 내의 데이터를 가져오기 위해 gazebo plugin을 사용해 ros2 topic으로 구독하려는 과정에서 libgazebo_gps_plugin.so 파일을 로딩할 수 없다는 에러 메시지를 확인할 수 있었다. 해당 파일은 있었지만 gazebo가 해당 파일이 위치하는 디렉터리의 경로를 찾지 못하는 것으로 판단됐다. 찾다보니 리눅스에서 공유 라이브러리를 찾을 때 사용하는 환경변수 LD_LIBRARY_PATH 설정이 필요했고 아래 명령을 .bashrc 파일에 작성하여 셸이 열릴 때 마다 실행되도록 해주었다.
이러한 리눅스에서 사용하는 환경변수 외에도 Gazebo에서 사용하는 주요 환경변수들을 찾다보니 아래와 같은 환경변수를 확인할 수 있었다.
GAZEBO_PLUGIN_PATH
Gazebo plugin을 검색할 경로를 지정하는 변수다. 이는 LD_LIBRARY_PATH와 유사해보인다. 어떻게 같고 다를까? LD_LIBRARY_PATH는 실행 중인 프로그램이 공유 라이브러리 파일을 검색할 경로를 지정할 때 사용하는 환경변수다. 반면 GAZEBO_PLUGIN_PATH는 Gazebo 플러그인을 검색할 경로를 의미하는 환경변수다. 즉 GAZEBO_PLUGIN_PATH를 통해 Gazebo plugin을 찾고 LD_LIBRARY_PATH를 통해 Gazebo plugin이 필요로 하고 의존하는 공유 라이브러리 파일을 찾는다.
GAZEBO_MODEL_PATH
Gazebo에서 모델을 검색할 경로를 지정하는 변수다. 이를 통해 사용자 정의 모델이나 외부 모델 경로를 추가할 수 있다.
GAZEBO_RESOURCE_PATH
Gazebo에서 리소스 파일을 검색할 경로를 지정하는 변수다. 여기서 리소스란 월드, 모델, 플러그인 등을 뜻한다.
GAZEBO_MASTER_URI
Gazebo 마스터 서버의 URI를 설정하는 변수다. Gazebo의 다중 인스턴스를 실행하거나 원격 Gazebo 서버와 통신할 때 사용한다.
GAZEBO_MODEL_DATABASE_URI
Gazebo 모델 데이터베이스 서버의 URI를 설정하는 변수다. 즉 원격으로 Gazebo 모델 데이터베이스에 접근하고 모델을 다운로드 받을 때 사용한다
PX4에서 앱을 만들고 SITL 상에서 실행시키는 'Hello World' 수행 예시를 정리하고자 하는 목적으로 작성한다. PX4에서 새로운 앱을 만들어 구동시키고자 한다면 PX4-Autopilot/src/ 폴더에서 수행해야 한다. 본 예제를 위해서는 새 디렉토리 'px4_simple_app'을 PX4-Autopilot/src/examples 하위에 생성한다. 이후 폴더와 동일한 이름의 px4_simple_app.c를 생성하고 아래 Hello World가 수행되는 코드를 붙여준다.
1. px4_simple_app.c 파일 생성
#include <px4_platform_common/log.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
PX4_INFO("Hello roytravel!");
return 0;
}
코드를 간단히 설명하자면 #include <px4_platform_common/log.h>를 통해 C언어의 printf와 같은 PX4의 출력 함수인 PX4_INFO를 실행할 수 있도록 라이브러리를 불러온다. 그리고 main 함수를 만들어주되 main 앞에 추후 PX4 상에서 사용할 모듈 이름을 함께 사용해준다. 이후 위 .c 파일과 마찬가지로 PX4-Autopilot/src/examples/px4_simple_app/ 하위에 CMakeLists.txt 파일을 만들어준다.
2. CMakeLists.txt 파일 생성
px4_add_module(
MODULE examples__px4_simple_app
MAIN px4_simple_app
SRCS
px4_simple_app.c
DEPENDS
)
MODULE은 PX4-Autopilot/src 하위의 examples에서 '/'를 '__'로 치환한 다음 모듈 이름을 적어주는 것 같다.
MAIN은 PX4 셸 또는 SITL 콘솔에서 호출할 수 있도록 NuttX에 명령을 등록하는 모듈의 진입점이라고 한다.
SRCS는 말그대로 빌드할 소스코드들을 기술한다. DEPENDS는 의존 라이브러리가 없으므로 널 값으로 보인다.
3. Kconfig 파일 생성
마찬가지로 PX4-Autopilot/src/examples/px4_simple_app/ 하위에 별도 확장자 없이 Kconfig 파일을 생성해주고 아래와 같이 값을 추가해준다.
PX4에서 lockstep이란 PX4와 시뮬레이터(ex: Gazebo) 간 동기화/비동기화 여부를 의미한다. Lockstep이 설정되어 있을 경우 PX4와 시뮬레이터는 자체 속도로 실행되지 않고 센서와 액츄에이터 메시지를 서로 기다리게 된다. 만약 설정되어 있지 않을 경우 PX4와 시뮬레이터는 각자의 속도로 수행된다. 이를 설정하기 위한 두 방법이 있다. 첫 번째는 PX4에서 설정하는 것이고 두 번째는 시뮬레이션 관련 파일에서 설정하는 것이다.
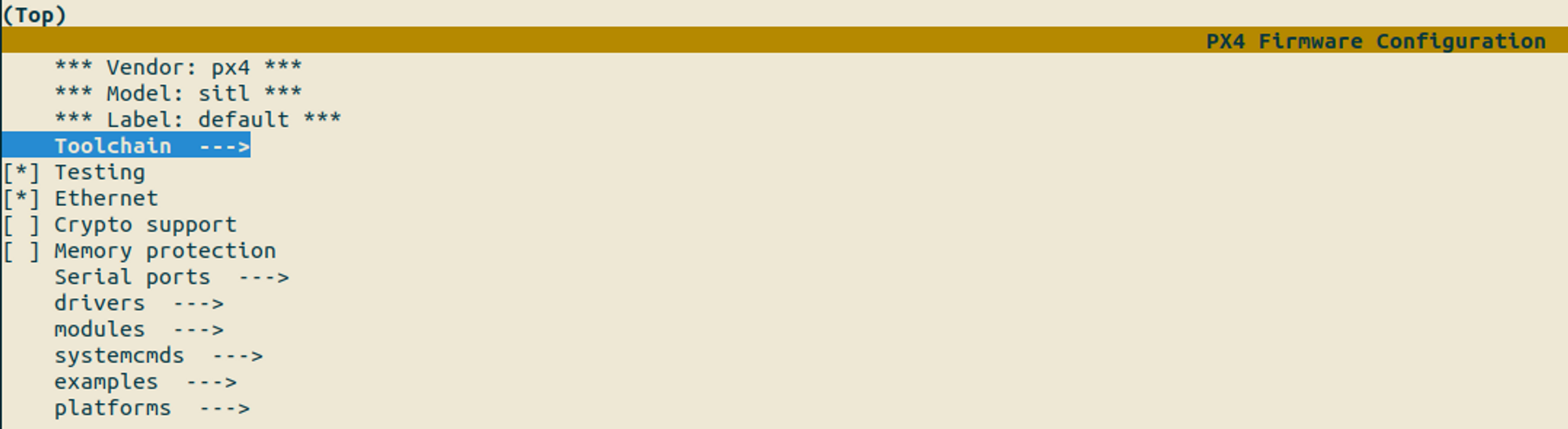
PX4에서 Lockstep을 해제하기 위해서는 make px4_sitl_default boardconfig 명령을 통해 보드 설정으로 접속하면 다음과 같은 화면을 볼 수 있다.
위 화면에서 방향키를 이용해 Toolchain에 들어가면 아래와 같이 “Force disable lockstep”이 있다.
기본값으로 활성화로 설정되어 있고 비활성화를 원할경우 엔터를 통해 비활성화 설정이 가능하다.
만약 시뮬레이션(Gazebo)에서 Lockstep을 해제하기 위해서는 SDF 파일 수정이 필요하며 아래 요소를 .sdf 파일에 추가해준다.
uXRCE-DDS: Extremely Resource Constrained Environment - Data Distribution Service
uXRCE-DDS는 미들웨어이자 프로토콜이다. uXRCE-DDS는 ROS2와 PX4 중간에서 통신을 매개하는 역할을 한다. uXRCE-DDS를 통해 ROS2에서 드론 관련 정보를 받아오고 또 명령을 보낼 수 있도록 한다. 아래 아키텍처를 살펴보자.
아주 직관적인 구성이다. PX4와 ROS2로 양분되어 있고 PX4와 ROS2 사이를 uXRCE-DDS 프로토콜로 연결한다. 드론 관련 정보를 ROS2로 제공하는 쪽이 uXRCE-DDS client고 이러한 정보를 가공하여 PX4쪽으로 명령을 내리는 곳이 uXRCE-DDS agent다.
PX4는 ROS2와 마찬가지로 토픽을 통해 드론 비행제어를 위한 정보를 주고 받는다. 즉 publisher를 통해 드론 관련 정보를 발행하고 subscriber를 통해 드론을 제어한다. PX4에서는 토픽을 통해 publisher/subscriber을 사용하는 형식은 ROS2와 같지만 ROS2의 publisher/subscriber와 달라 호환되지 않는다. 이러한 호환을 가능하게 하는 것이 uXRCE-DDS인 것이다.
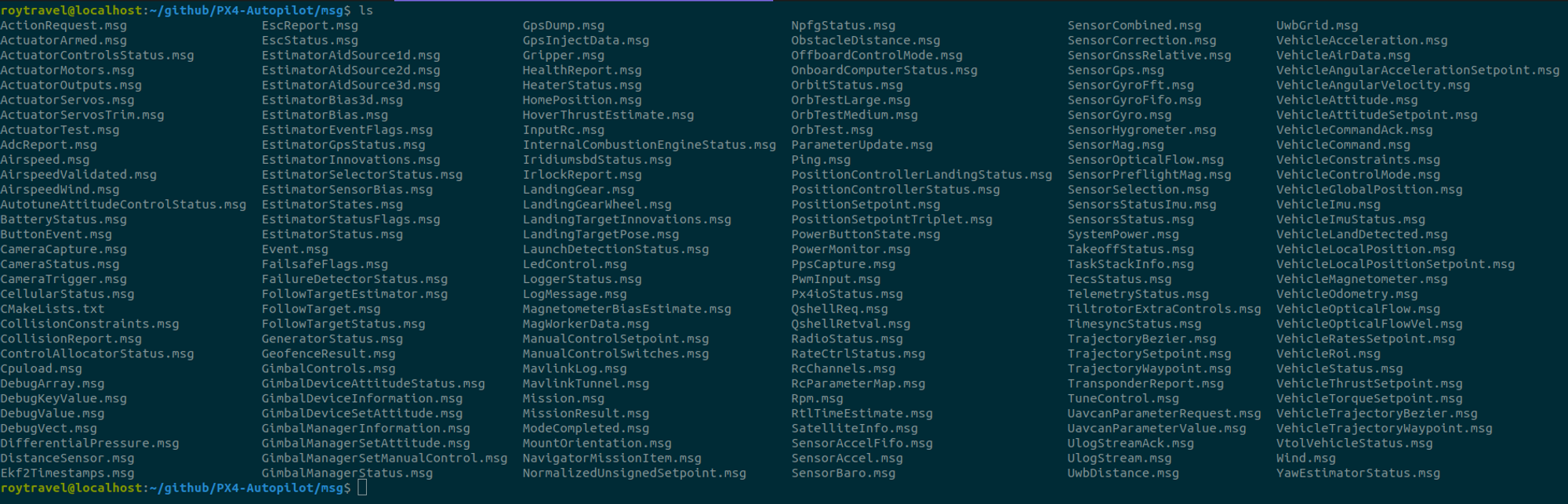
PX4는 토픽 publish/subscribe를 uORB를 통해 수행한다. uORB는 PX4의 내부에서 토픽이 동작할 수 있도록 하는 PX4 내부통신 메커니즘이다. PX4에서도 토픽을 사용하기 위해서는 ROS2에서와 마찬가지로 메시지 포맷이 필요하다. ROS2에서와 같이 *.msg 확장자를 가진다. 직접 확인해보자. https://github.com/PX4/PX4-Autopilot에서 소스를 다운로드 받아 msg 폴더를 살펴보면 아래와 같이 미리 정의되어 저장된 msg 파일을 확인할 수 있다.
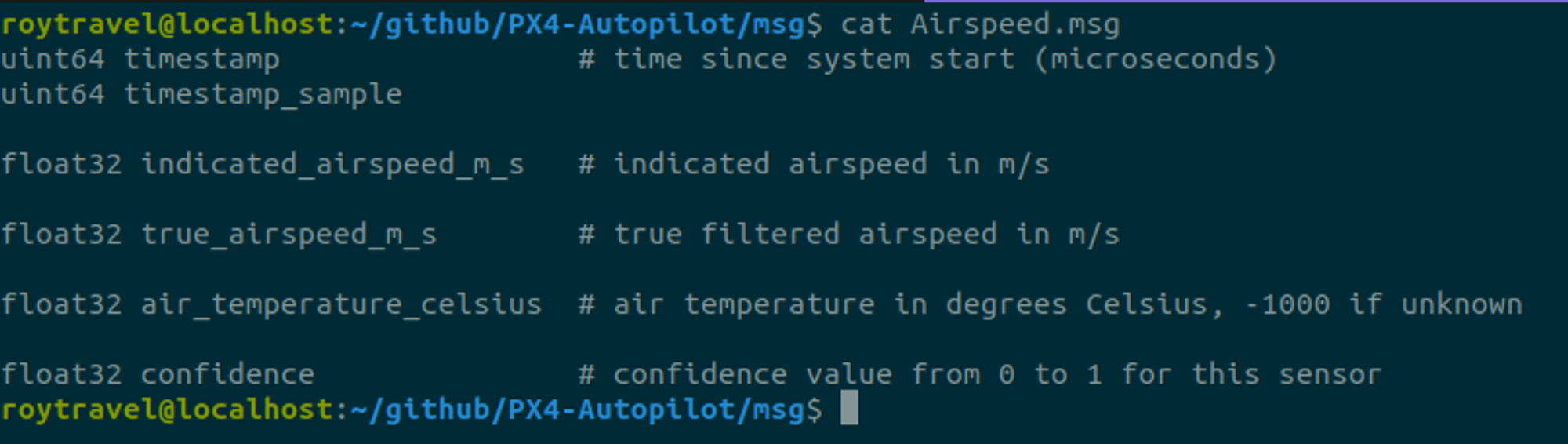
간단한 예시를 위해 Airspeed.msg를 살펴보면 다음과 같은 데이터 포맷으로 메시지 파일이 정의가 되어 있다.
PX4에서는 토픽을 사용하기 위해 *.msg 파일을 사용하지만 *.msg 파일을 바로 읽어 사용하는 것은 아니다. *.msg 파일은 빌드되어 C++ 구조체로 변환되어 사용된다. 실제로 *.msg 파일이 빌드되면 PX4-Autopilot/build/px4_sitl_default/uORB/topics 폴더에 *.h 파일로 저장된다. 아래는 Airspeed.msg가 빌드되어 저장된 airspeed.h 파일이다.
이렇게 변환된 헤더 파일에 저장된 메시지 포맷을 통해 토픽 publish/subscribe가 이뤄진다. 참고로 토픽은 빌드될 때 *.msg 파일 명과 동일한 이름으로 등록된다. abc.msg를 빌드하면 abc라는 이름의 토픽으로 등록되는 것이다.
이러한 토픽은 ROS2에서 노드(Node) 내부에서 구현된다. PX4에서도 마찬가지다. PX4에서는 ROS2의 노드를 모듈(module)이라 부르며 모듈 단위로 토픽을 publish/subscribe한다. 예컨데 카메라 센서 모듈, IMU 센서 모듈 등으로 모듈을 구현하여 토픽을 publish하고 subscribe하는 것이다. 만약 여러 모듈 간의 통신이 필요한 경우라면 PX4는 내부적인 모듈 간의 통신을 uORB를 통해 수행한다.
핵심 요약을 하자면 미들웨어라 불리는 XRCE-DDS client와 XRCE-DDS agent가 PX4-ROS2 통신의 핵심이다. 또 ROS2의 노드는 XRCE-DDS agent/client를 거쳐 PX4의 uORB 메시지 형태로 바뀌어 드론에게 전달되고 uORB 메시지는 XRCE-DDS client/agent를 거쳐 ROS2에서 제어 가능한 형태로 바뀌어 전달된다.
실제로 uXRCE-DDS client와 uXRCE-DDS agent를 사용해 드론 비행제어를 수행해보자.
uXRCE-DDS agent
uXRCE-DDS agent를 실행하기 위해서는 소스코드를 다운로드 받아야 한다.
git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent
mkdir build
cd build
cmake ..
make
sudo make install
sudo ldconfig /usr/local/lib/
cd ~/Micro-XRCE-DDS-Agent/build
./MicroXRCEAgent udp4 -p 8888
위 명령을 수행하면 아래와 같이 Agent가 실행됨을 확인할 수 있다.
uXRCE-DDS client
uXRCE-DDS client는 단순히 make px4_iris_default gazebo 명령을 통해 시뮬레이션 환경을 실행할 때 자동으로 실행된다.
cd ~/PX4-Autopilot
make px4_sitl_default gazebo
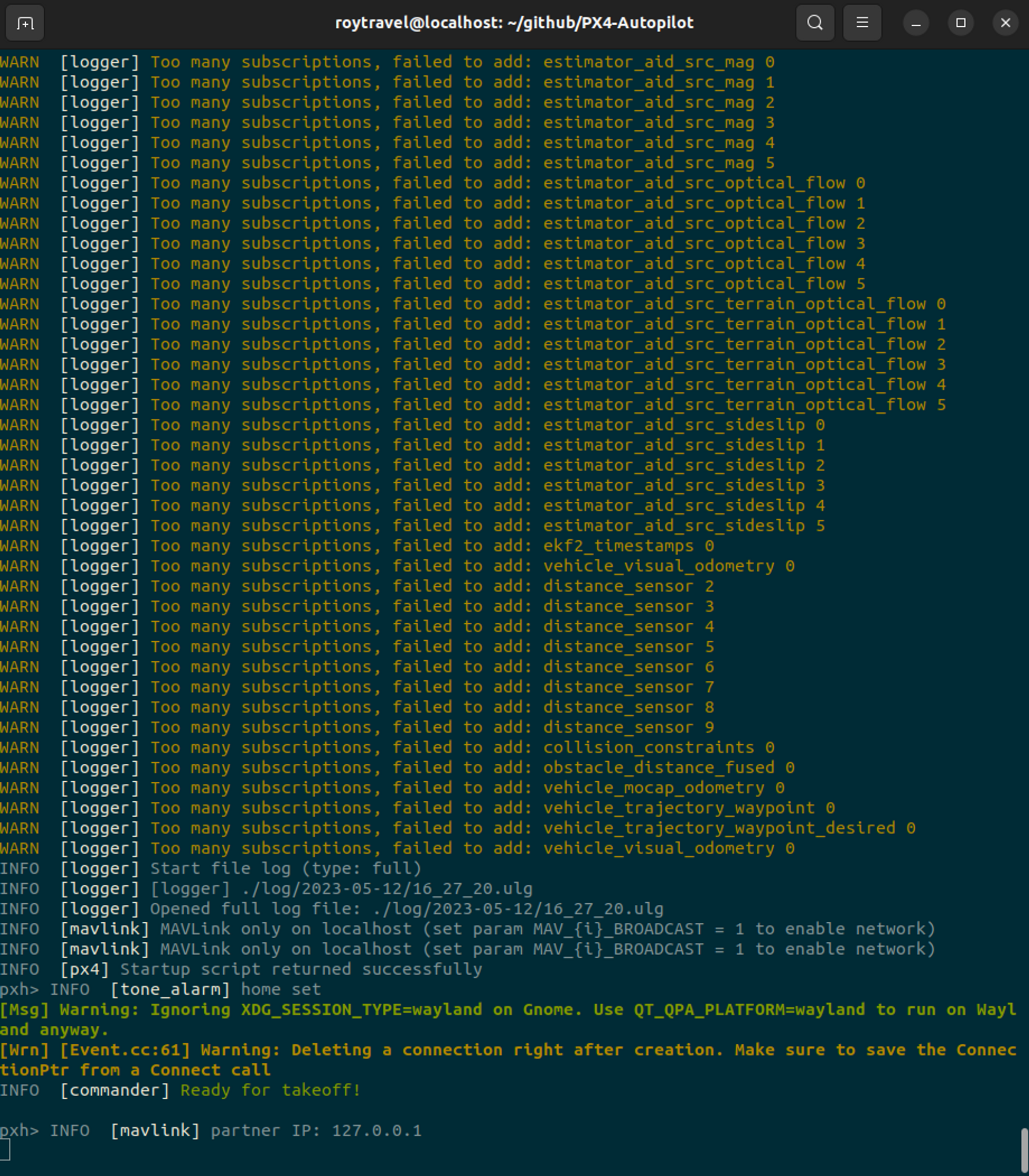
위 명령을 수행하면 아래와 같이 로그에 uxrce_dds_client가 실행되는 것을 확인할 수 있다.
여기까지하면 ROS2를 통해 드론 비행제어할 준비가 된 것이다. 마지막으로 이를 제어하기 위한 소스코드를 다운로드 받아 실행시켜보자.
mkdir -p ~/ws_offboard_control/src
cd ~/ws_offboard_control/src
git clone https://github.com/PX4/px4_msgs.git
git clone https://github.com/PX4/px4_ros_com.git
cd ..
source /opt/ros/humble/setup.bash
colcon build
source install/local_setup.bash
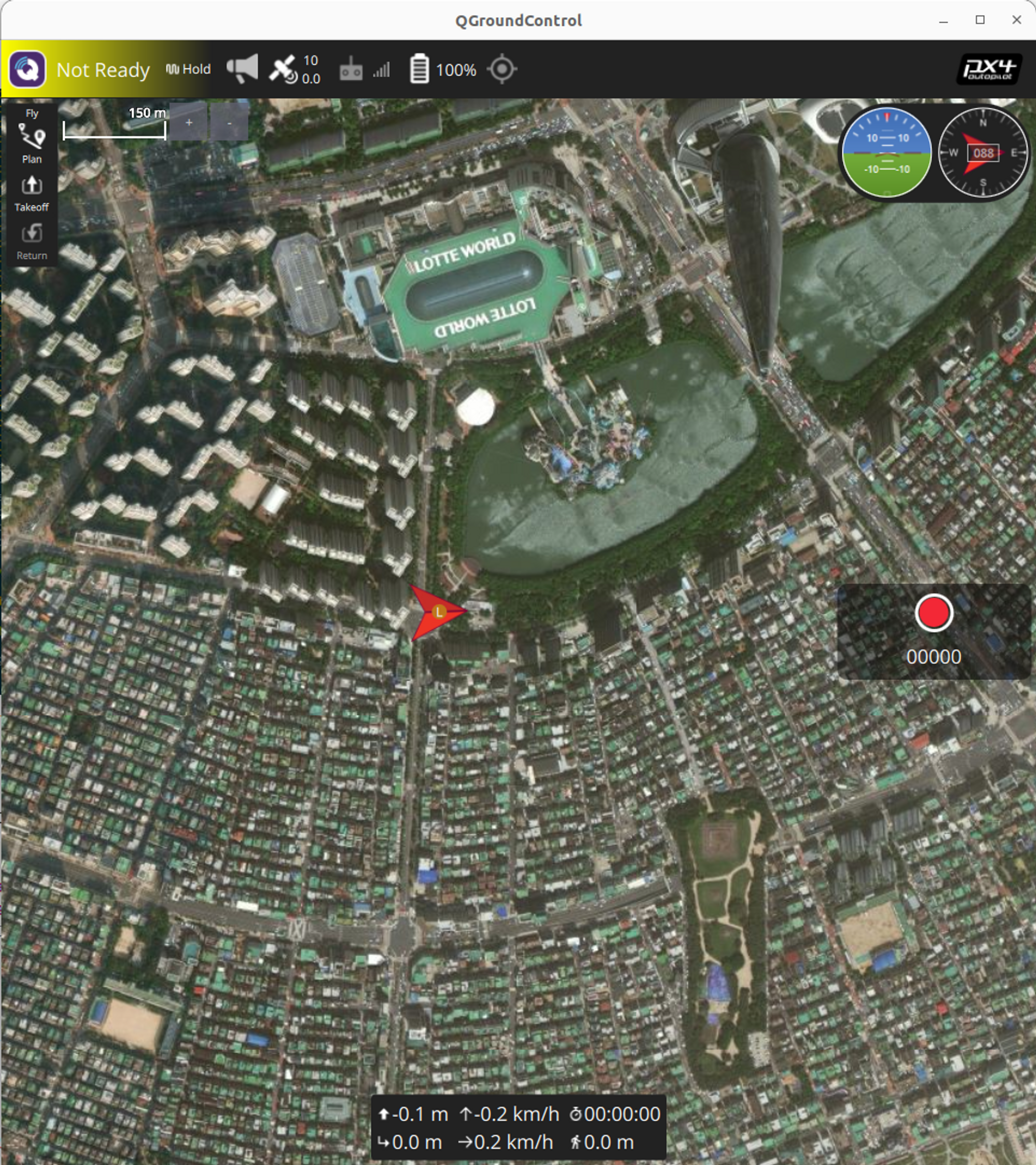
ros2 run px4_ros_com offboard_control
위 명령을 수행하게 되면 아래와 같이 ROS2를 통해 PX4에서 실행된 gazebo 환경에서 드론 비행이 가능한 것을 확인할 수 있다.
파이썬으로 데이터베이스 처리를 위해 pymysql을 사용해 MySQL 쿼리는 자주 다뤘지만 pymongo를 이용한 MongoDB 쿼리는 많이 다뤄보지 못했다. pymongo 쿼리문은 pipeline으로 만들어 실행하는 것이 깔끔하게 작성하고 실행할 수 있다 생각들었다. 작성하고보니 pipeline은 단 3줄 밖에 안되지만 레퍼런스가 적다고 느꼈고 익숙하지 않아 조금의 시간이 소요됐다. 추후에도 많이 사용할 코드 스니펫일 것 같아 기록.
import os
from pymongo import MongoClient
from operator import itemgetter
client = MongoClient(host=os.environ.get('MONGO_HOST'),
port=int(os.environ.get('MONGO_PORT')),
username=os.environ.get('MONGO_USERNAME'),
password=os.environ.get('MONGO_PASSWORD'))
db = client[os.environ.get('MONGO_DB')]
collection = db['name']
pipeline = []
pipeline.append({'$match': {'col1': val1, 'col2': {'$gte', 1682899200}}})
pipeline.append({'$project': {'_id': True, 'col1': True, 'col2': True, 'col3': True}})
pipeline.append({'$limit': 100000})
unsorted_docs = collection.aggregate(pipeline)
unsorted_documents = []
unsorted_documents.extend(unsorted_docs)
documents = sorted(unsorted_documents, key=itemgetter('event_time'))
for document in documents:
...
ROS2에서 통신을 구현하기 위해 사용하는 서비스, 액션, 메시지에서 사용하는 interfaces를 커스텀하여 정의해야 하는 경우가 있다. 이를 커스텀하기 위해 별도의 폴더를 만들고 빌드해주지 않으면 파이썬에서 라이브러리로 불러오거나 C++에서 include할 때 에러가 발생한다.
ROS에서 명령을 실행하는 방법은 두 가지로 run과 launch가 있다. run은 단일한 명령이고 launch는 run의 집합이다. 만약 두 개의 ros 명령을 수행하려면 터미널 두 개를 띄우거나 실행하려는 두 명령을 다 입력해주어야 한다. ROS를 다루다보면 여러 ROS 명령을 수행해야 하므로 효율성을 위해 사실상 launch를 실질적으로 더 많이 사용한다. 파이썬을 이용해 launch 파일을 만들고 gazebo와 rviz를 띄우는 일종의 hello world를 수행해보자.
이를 위해 가장 먼저 작업 디렉터리를 생성하고 작업 디렉터리로 들어간다.
mkdir -p test_ws/src
cd test_ws/src
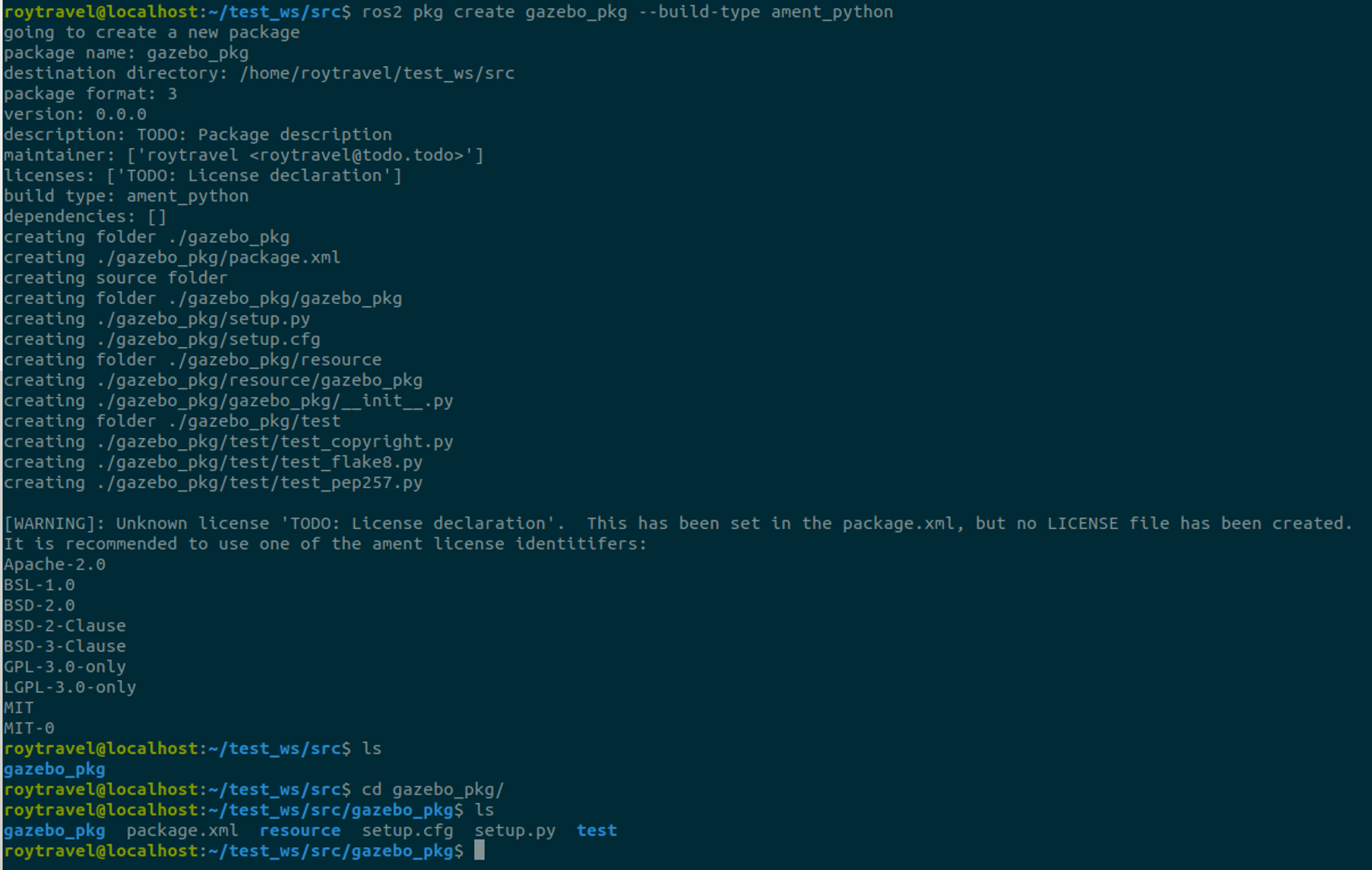
ROS는 패키지 단위로 프로그래밍이 이뤄지므로 아래 ROS 명령을 통해 패키지를 생성한다.
“gazebo_pkg”는 생성할 패키지 명이다. --buile-type은 사용할 빌드 시스템을 의미한다. ROS1에서는 catkin이 사용되었으나 ROS2에서는 catkin의 업그레이드 버전인 ament를 사용한다. 여기서 ament_python은 파이썬 전용 ament 빌드 시스템이다. 위 명령어를 수행하면 다음과 같이 패키지 폴더가 생성되며 폴더로 들어가면 아래와 같은 파일이 자동으로 생성된다.
목표는 시뮬레이션을 위한 gazebo와 시각화를 위한 rviz를 같이 띄우는 것이다. 이를 위해 launch 파일을 만들어야 하며 이러한 launch 파일이 담길 폴더를 ‘launch’로 생성해준다. 이는 ROS 개발에 있어 컨벤션으로 가급적 지켜주면 좋다. 이후 test.launch.py를 만들어 준다.
이후 gazebo와 rviz2를 실행하는 아래 코드를 test.launch.py 파일에 작성해준다
코드를 살펴보자면 launch 파일이 실행되기 위해 반드시 generate_launch_description 함수를 만들어야 한다. 이후 LaunchDescription에 수행할 명령을 리스트로 담아주면 된다. LaunchDescription은 해당 launch 파일이 실행해야 할 목록을 기술하는 클래스다. 안을 살펴보면 ExecuteProcess 클래스가 두 개 있다. 사용법이 매우 간단한 형태로 수행할 명령을 cmd 인자에 입력해주고 output 인자를 통해 로그를 터미널에 출력해줄 수 있도록 screen을 입력한다.
cd ~/test_ws
source /opt/ros/humble/local_setup.bash
ROS2 환경을 현재 셸 세션에 로드하여 ROS2 실행에 필요한 실행파일, 라이브러리, 환경변수 등에 접근할 수 있도록 하는 명령어다.
터미널이 새로 열릴 때 마다 새로운 세션이 생성되므로 매번 입력해주어야 한다. 귀찮다면 .bashrc에 해당 명령어를 입력해두면 터미널이 생성될 때 마다 자동으로 실행된다.
참고로 setup.bash가 있고 local_setup.bash가 있다. 둘 간의 차이점은 전자는 전역적으로 설치된 패키지 설정이고 후자는 지역적으로 설치된 패키지에 대한 설정을 수행한다. setup.bash를 수행하면 전역적으로 수행되어 간편하지만 다른 패키지와 충돌(?)이 발생할 수 있으므로 가급적(?) local_setup.bash를 사용한다.
만약 위 명령을 수행하지 않고 launch 파일을 실행하면 다음과 같이 만들어주었던 패키지 폴더를 찾지 못했다는 에러를 확인할 수 있다.
위 명령을 수행하고 다시 실행해보자. 이번엔 다른 에러가 발생했다. gazebo_pkg 폴더 안에 test.launch.py가 없다고 한다.
이렇게 에러가 발생하는 이유는 빌드 당시 setup.py를 제대로 설정해주지 않아서 발생한다.
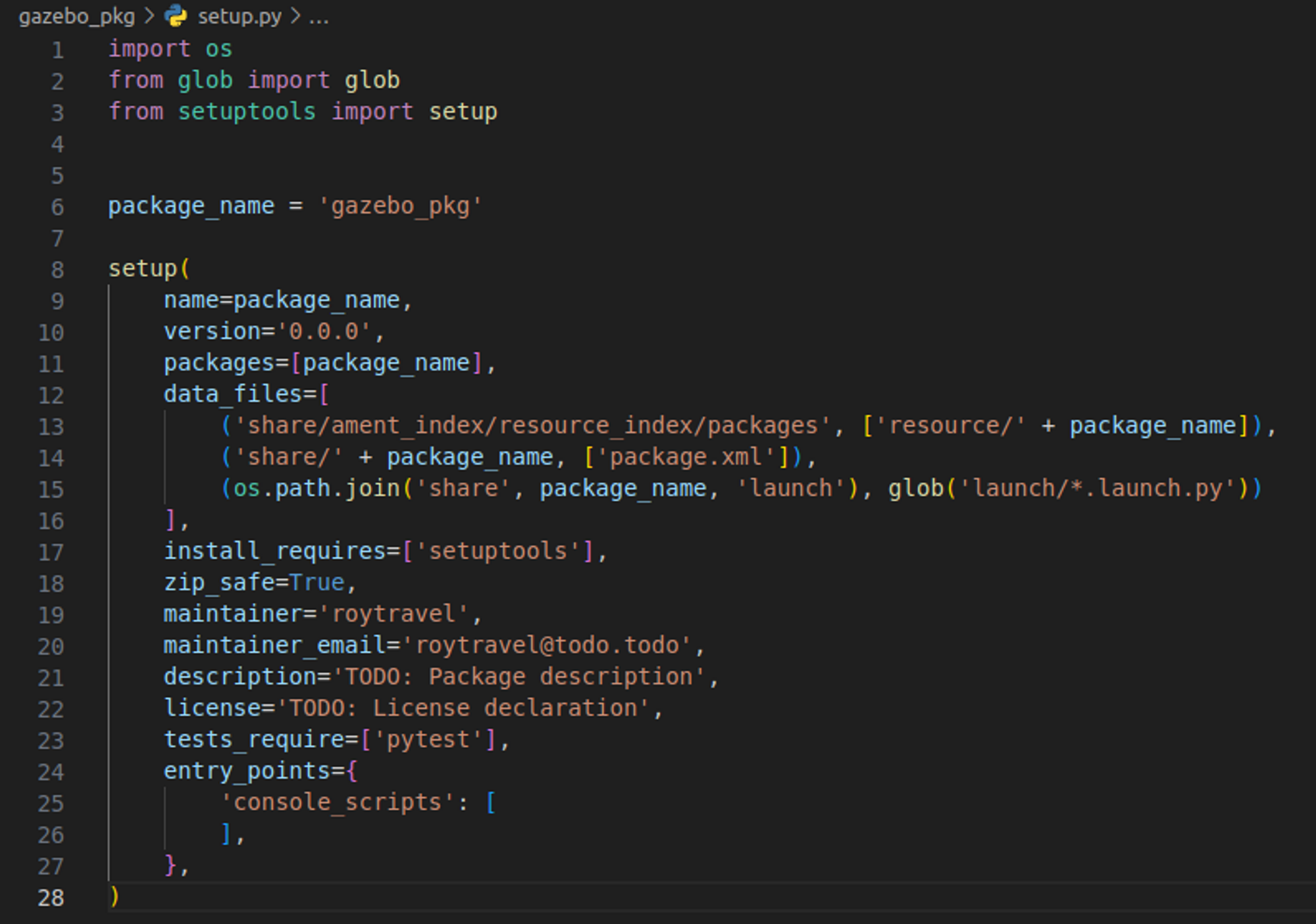
~/test_ws/src/gazebo_pkg/setup.py에 들어가서 아래 15번째 줄에 있는 os.path.join(’share’, package_name, ‘launch’), glob(’launch/*.launch.py’))를 추가해주자. (import os, from glob import glob도 함께)
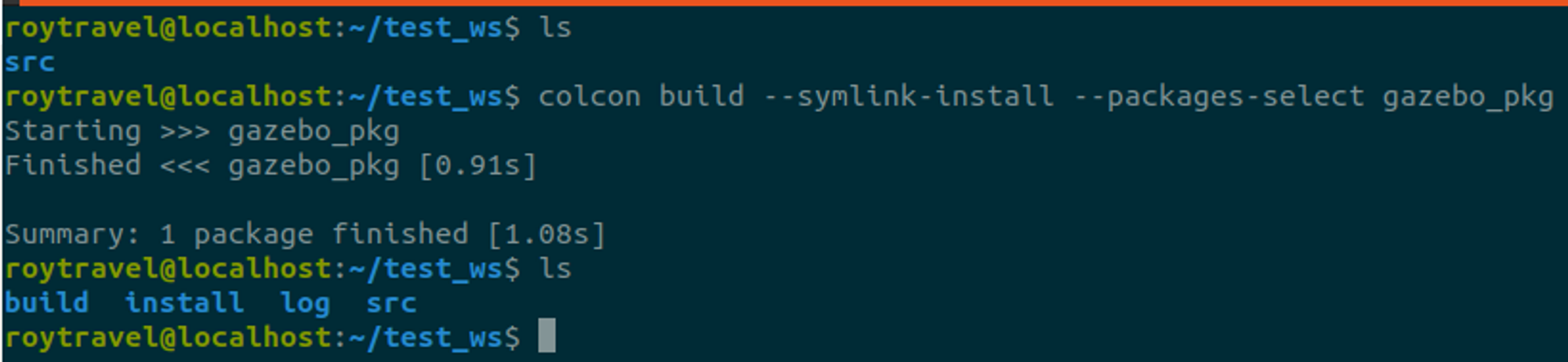
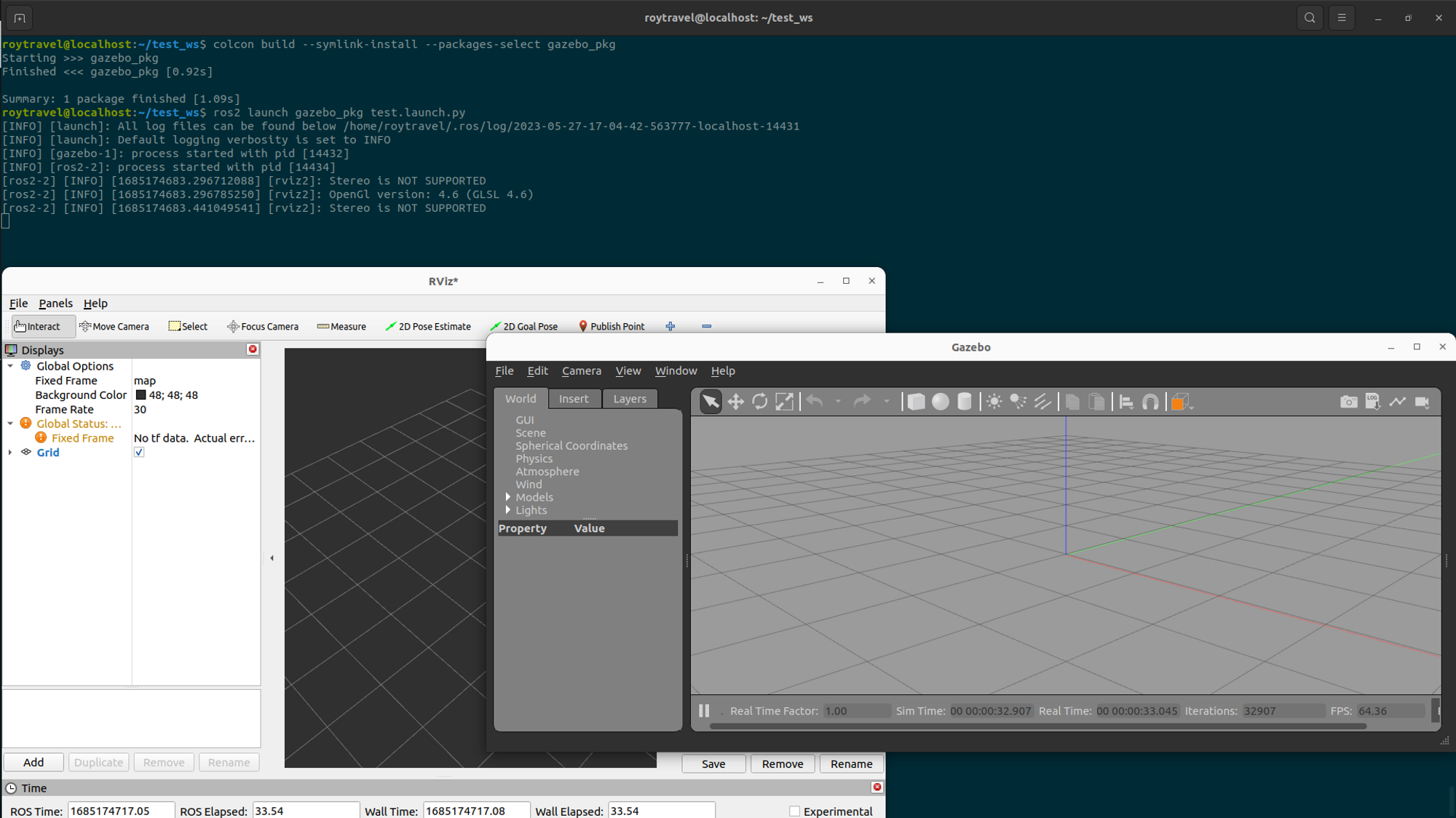
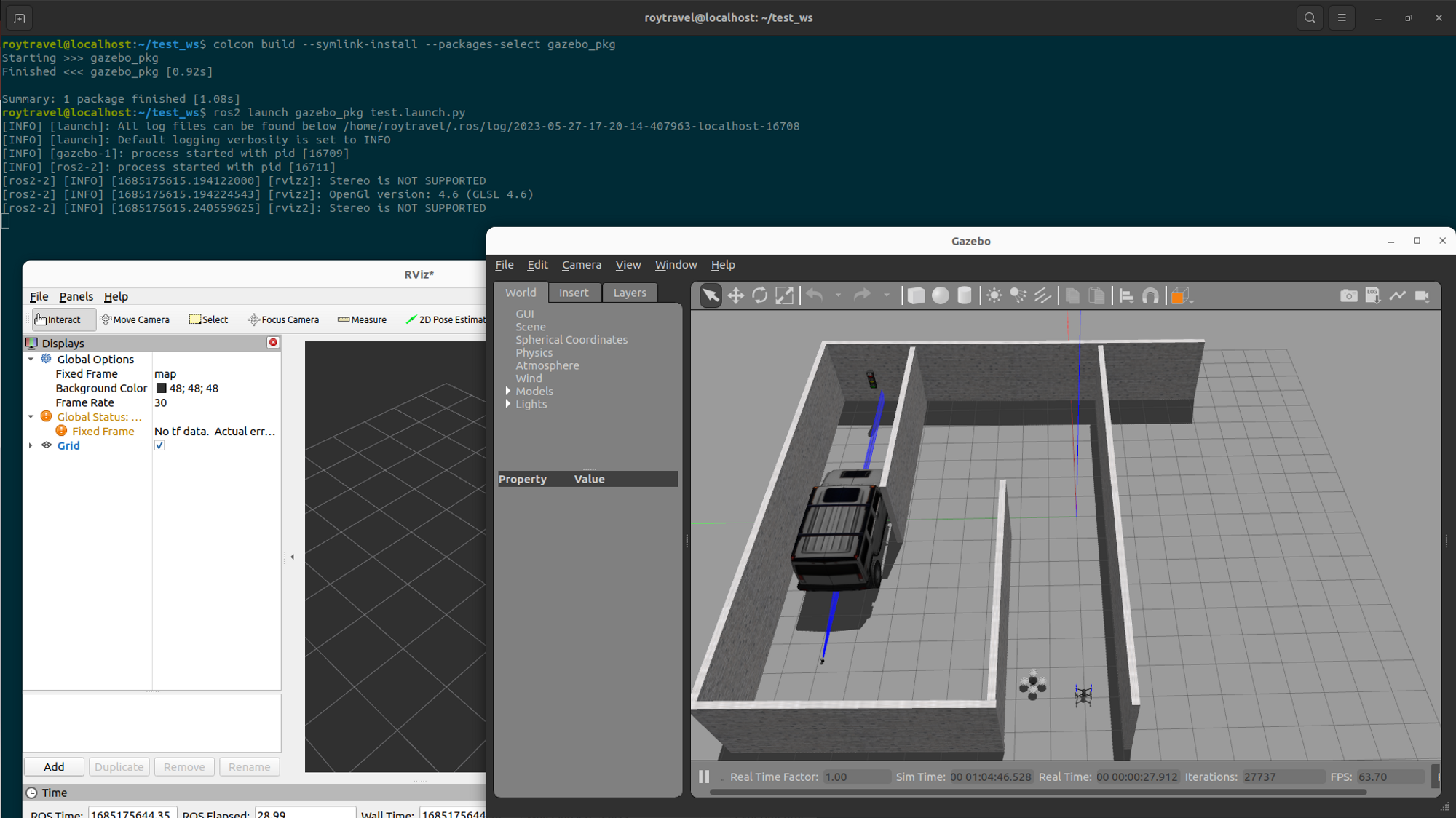
이후 다시 colcon build --symlink-install --packages-select gazebo_pkg 명령을 통해 빌드를 다시 수행한 뒤, launch 파일 실행을 위해 ros2 launch gazebo_pkg test.launch.py를 수행해주면 아래와 같이 gazebo와 rviz2가 함께 실행되는 것을 확인할 수 있다.
만약 gazebo를 실행할 때 시뮬레이션 환경이 구성되어 있는 world 파일을 넣고자 한다면 test.launch.py와 setup.py를 아래와 같이 살짝만 코드를 바꿔 world 파일 경로 인자를 추가해주는 방식으로 gazebo 실행 시 이미 만들어진 시뮬레이션 환경을 구성할 수 있다. (world 파일이 없다면 이전 포스팅 참고)
Gazebo를 통해 시뮬레이션을 수행하기 위해선 시뮬레이션 환경구성에 필요한 모델을 추가해야 한다. 가령 자율주행이라면 모델은 차, 버스, 신호등, 횡단보도 등이 될 수 있다. 이러한 모델을 통해 구성한 시뮬레이션 환경은 반복해서 사용하기 때문에 Gazebo를 실행할 때 마다 이미 만들었던 모델을 불러올 수 있어야 한다. 이를 불러오기 위해서는 모델들을 담은 .world 파일이 필요하다. gazebo에서 모델을 만든 다음 .world 파일로 저장함으로써 생성할 수 있다.
gazebo 실행
gazebo --verbose
gazebo가 실행되면 위와 같이 아무 것도 없는 plane world가 나타난다. 이후 Insert 탭을 통해 모델을 추가하여 world를 구성할 수 있다.
로컬에 저장해둔 모델이 있다면 이를 사용할 수도 있지만 서버에서 제공해주는 모델을 사용해서 world를 구성할 수 있다. 맨 아래 http://models.gazebosim.org를 클릭해보면 해당 서버에서 제공해주는 모델 리스트를 아래와 같이 확인할 수 있다.
간단한 예시로 Bus와 SUV를 다음과 같이 불러올 수 있다.
world 파일로 저장하는 단축키인 Ctrl + Shift + S를 통해 저장할 수 있다. test.world 파일로 다음과 같이 저장하고 gazebo를 종료한다.
두 모델이 담긴 world 파일을 불러오기 위해 gazebo가 실행될 때 아래와 같이 명령어를 입력해주면 구성했던 시뮬레이션 환경을 다시 로딩할 수 있다.
nproc # 자신 시스템의 코어 수 확인
# build (modify the core number '12' after option -j accordingly)
make -j8 # 자신 시스템 코어 수에 맞게 -j 다음의 숫자를 변경
# install
sudo make install
# check if it is installed successfully
pkg-config --modversion opencv4
4. 설치 확인
4.1 OpenCV 동작 여부 확인
아래 코드를 test.cpp라는 파일명으로 저장
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main(int, char**)
{
VideoCapture cap(0);
if (!cap.isOpened()){
printf("카메라를 열수 없습니다. \\n");
}
Mat frame;
namedWindow("camera1", 1);
for (;;)
{
cap >> frame;
imshow("camera1", frame);
if (waitKey(20) >= 0) break;
}
return 0;
}