PX4에서 lockstep이란 PX4와 시뮬레이터(ex: Gazebo) 간 동기화/비동기화 여부를 의미한다. Lockstep이 설정되어 있을 경우 PX4와 시뮬레이터는 자체 속도로 실행되지 않고 센서와 액츄에이터 메시지를 서로 기다리게 된다. 만약 설정되어 있지 않을 경우 PX4와 시뮬레이터는 각자의 속도로 수행된다. 이를 설정하기 위한 두 방법이 있다. 첫 번째는 PX4에서 설정하는 것이고 두 번째는 시뮬레이션 관련 파일에서 설정하는 것이다.
PX4에서 Lockstep을 해제하기 위해서는 make px4_sitl_default boardconfig 명령을 통해 보드 설정으로 접속하면 다음과 같은 화면을 볼 수 있다.
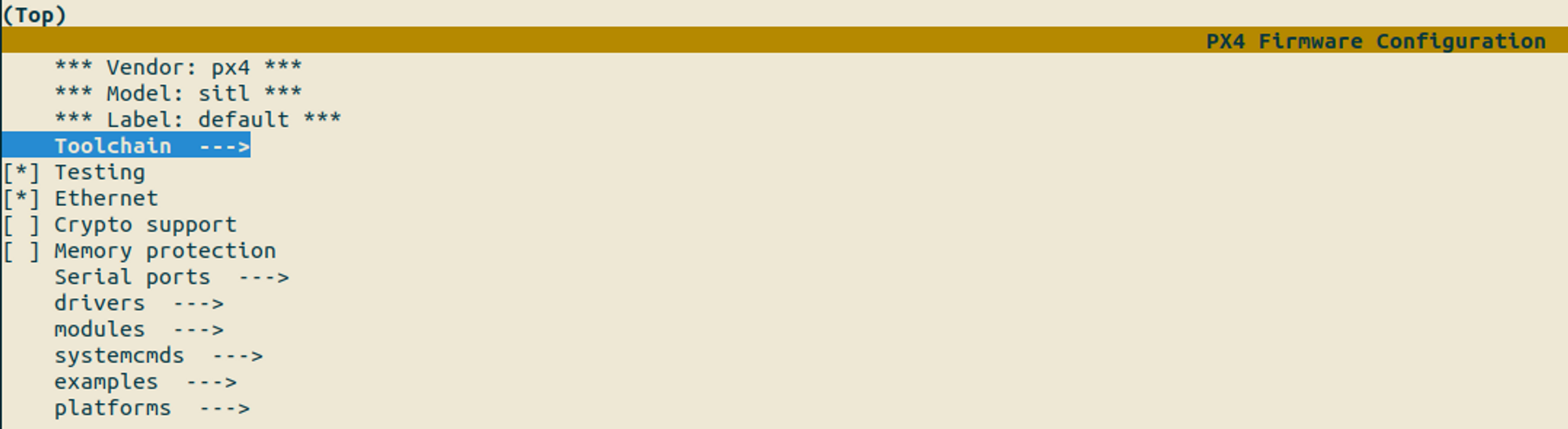
위 화면에서 방향키를 이용해 Toolchain에 들어가면 아래와 같이 “Force disable lockstep”이 있다.

기본값으로 활성화로 설정되어 있고 비활성화를 원할경우 엔터를 통해 비활성화 설정이 가능하다.
만약 시뮬레이션(Gazebo)에서 Lockstep을 해제하기 위해서는 SDF 파일 수정이 필요하며 아래 요소를 .sdf 파일에 추가해준다.
<enable_lockstep>false</enable_lockstep>'Computer Science > 로봇공학' 카테고리의 다른 글
| Gazebo 환경변수 목록 (0) | 2023.06.24 |
|---|---|
| [PX4] Offboard 어플리케이션 예제 (0) | 2023.06.19 |
| uXRCE-DDS 미들웨어와 드론 비행제어 (0) | 2023.06.19 |
| ROS2 커스텀 interface 생성하기 (0) | 2023.06.11 |
| ROS2 launch 파일로 Gazebo와 Rviz2 실행하기 (0) | 2023.06.11 |