2020년 대한전자공학회에서 나온 논문이다. 핵심은 제목 그대로 자율주행드론을 위한 위치제어와 고도제어가 핵심이다. 연구배경은 GPS와 같은 센서는 외부환경에서는 사용할 수 있지만 실내와 같은 내부환경에 들어오게 되면 차폐된 내부로 인해 GPS 신호가 단절될 수 있어 자율주행의 한계가 있다는 점이다. 따라서 실내환경에서 드론의 자율비행 임무수행을 위한 위치제어와 고도제어 방법에 대해 제시한다.
1. 위치제어
위치제어란 실내에서 장애물회피 임무를 수행할 뿐아니라 드론 기체가 외력을 받아 Drift되지 않도록 위치를 제어하는 것을 말한다. 논문에서는 위치제어를 위한 방법으로 px4flow를 사용해 컴퓨터비전 알고리즘을 적용했다. px4flow란 optical flow 센서 중 하나인데 optical flow는 영상을 통해 호버링 시 기체의 위치가 흔들리지 않도록 도와주는 센서다. (https://docs.px4.io/v1.13/ko/sensor/px4flow.html)
2. 고도제어
고도제어란 지면으로부터 거리를 조절하는 것이다.
자율주행에 고도제어가 필요한 이유는 3차원 공간(x, y, z)의 특정지점에서 비행이 가능해야 하기 때문이다. 드론의 고도제어를 위해 사용하는 센서는 적외선 센서, 기압센서, 초음파센서, 라이다센서가 있다. 결론부터 말하면 논문에선 다 사용해보았으나 라이다센서가 가장 높은 정확성을 보였다. 서술한 센서의 실험 결과를 차례대로 기술해보자면,
2.1 적외선 센서
적외선 센서를 사용한 결과 온도에 영향을 받아 외부환경 파악에 신뢰성 떨어지는 신호를 수신했다.
2.2 기압 센서
Pixhawk에 내장되어 있다고만 서술되어 있고 이에 대한 실험 내용은 누락되어 있음.
2.3 초음파 센서
초음파 센서는 초음파 방출 후 물체에 반사되어 돌아오는 시간을 통해 물체와의 거리를 구하는 센서다. 초음파 센서를 사용한 결과 비교적 고른 값을 수신하나 중간값, 평균값에 차이가 많이나는 이상치가 수신되는 경우가 발생했다. 이 이상치는 확장칼만필터(EKF)로 보정을 했음에도 고도제어에 부정확성을 야기하는 것이 관찰되었다.
실험에 사용한 초음파센서는 Maxbotix사의 HRLV-MaxSonar-EZ4 센서이며, EZ4에서 0~4는 빔폭을 나타내고 클수록 빔폭이 좁아진다. 초음파 센서에 들어온 아날로그 신호를 ADC 포트를 거쳐 디지털 신호로 바뀐다음 Pixhawk로 전달된다. 초음파 센서의 입력값을 정확히 이용하기 위해선 Scaling 파라미터를 조절해주어야 한다. 이는 Ardupilot 공식 홈페이지에서 제시하는 값이 있으나 오차가 커서 잘 들어맞지 않았다.
2.4 라이다 센서
라이다 센서를 px4flow 센서와 함께 사용한 결과 드론 위치와 고도를 제어할 수 있었고 실내 환경에서 높은 신뢰성을 얻었다. 실험에 사용한 제품은 Benewake 사의 TF mini LiDAR를 사용했다. 이는 단거리 측정을 목적으로 개발된 센서로 실내에서 최대 12m, 실외에서 최대 7m 거리를 측정가능하다. TF mini Lidar는 Serial, UART, I2C 통신 등 다양한 방법으로 연결할 수 있고 실험에선 Serial 포트를 통해 연결했다. LiDAR 센서를 통한 실험의 결과로는 별다른 센서 calibration 없이 비교적 정확한 값을 측정할 수 있었다. 논문에선 Pixhawk와 LiDAR 센서의 Serial 통신에서 BaudRate를 115200으로 설정해줘야 한다고 한다.

3. 실험 결과
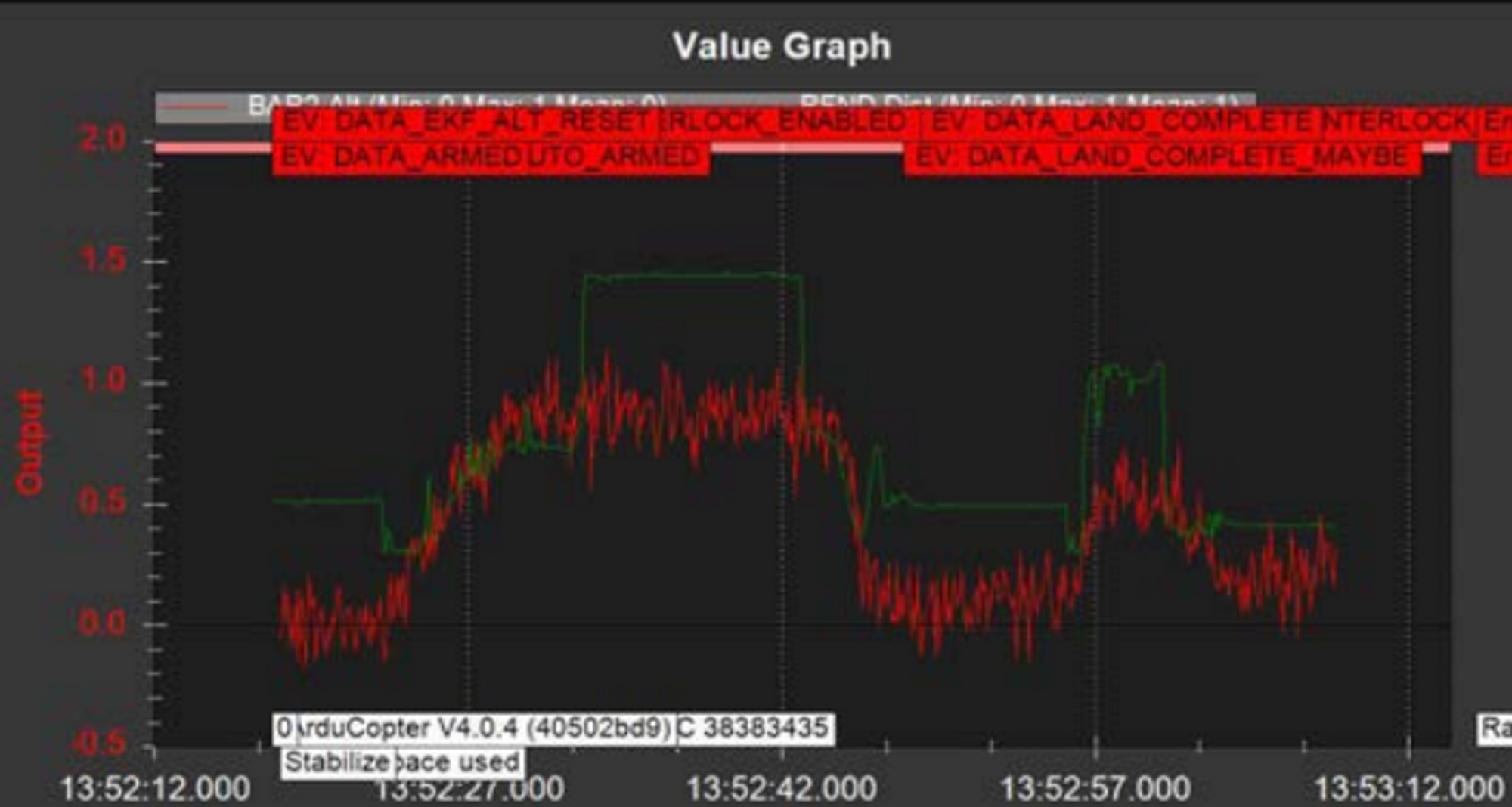
초록선이 라이다 센서고 빨간선이 초음파 센서다. 초음파의 경우 드론이 움직일 때 마다 값의 변화가 크다. 즉 노이즈가 많이 추가되는 것을 볼 수 있다. 반면 라이다 센서는 안정적인 고도값을 측정했다. 초음파 센서는 0.5m 이상 오차가 발생했지만 라이다 센서는 0.05m의 오차만 발생했다고 한다. 위에서도 기술했지만 초음파 센서 값을 EKF로 보정했으나 오히려 이착륙시 고도제어가 더 불안정하게 되었고 결론적으로 고도제어에는 초음파 센서가 적합하지 않다는 결론을 내렸다.
--- 결론 ---
다른 적외선 센서나 기압 센서와의 비교가 없으나 결론적으로 라이다 센서가 가장 드론 위치제어와 고도제어에 안정적이라고 한다.
--- 이외 기타 내용 정리 ---
- px4flow 사용을 위해 초점 조절과 calibration을 수행해야 하는데 이는 파라미터로서 지원되고 파라미터 설정이 가능한 GCS를 사용해 가능함. 논문에선 Mission Planner 사용
- px4flow calibration은 기체의 자이로 정보와 px4flow의 자이로 정보를 일치시킴으로써 수행함. 이를 위해 기체 프로펠러를 뺀 체 손으로 roll, pitch 동작을 반복하고 이후 로그를 통해 pixhawk의 자이로 값과 px4flow의 자이로 값을 비교해 오차가 있다면 파라미터를 변경해 오차를 줄이는 방식을 사용함.
- px4flow 정상작동을 위한 전원공급을 위해 BEC를 이용해 5V 전원 별도 공급
- px4flow와 pixhawk 간의 연결을 위해 I2C 통신포트를 사용.
--- Question ---
Q1. 위 그래프의 초록선은 저자가 간단히만 언급했던 라이다 센서와 px4flow 센서를 함께 결합한 성능인가 라이다 센서의 독립적인 성능인가?
Q2. 라이다 센서 vs 카메라 센서를 비교하면 어떨까?
Q3. PMW란 무엇인가?
Q4. QGroundController에서도 px4flow calibration을 수행할 수 있는가?
'Computer Science > 로봇공학' 카테고리의 다른 글
| [논문리뷰] 오픈소스 소프트웨어 PX4를 이용한 UAV 자율탐사 및 경로계획에 관한 연구 (0) | 2023.06.29 |
|---|---|
| [논문 리뷰] PX4 Autopilot 기반 드론의 데이터 추출 및 분석 도구 (0) | 2023.06.29 |
| [논문 리뷰] 드론의 장애물 회피 기반 비행 시뮬레이터 설계 (0) | 2023.06.28 |
| [논문 리뷰] PX4-ROS2 기반 드론 장애물 회피 시스템 개발 (0) | 2023.06.27 |
| TIL (230626) (0) | 2023.06.26 |