1. 필수 빌드 패키지 설치
sudo apt-get install build-essential
2. VSCode에서 C/C++ extension 설치

3. Ctrl + Shift + P로 구성 편집(UI) 선택

4. 컴파일러 선택 (C: gcc, C++: g++)

5. IntelliSense 모드

6. 설정파일 확인
- 위 설정한 값들이 아래 json 파일 형태로 저장됨을 확인

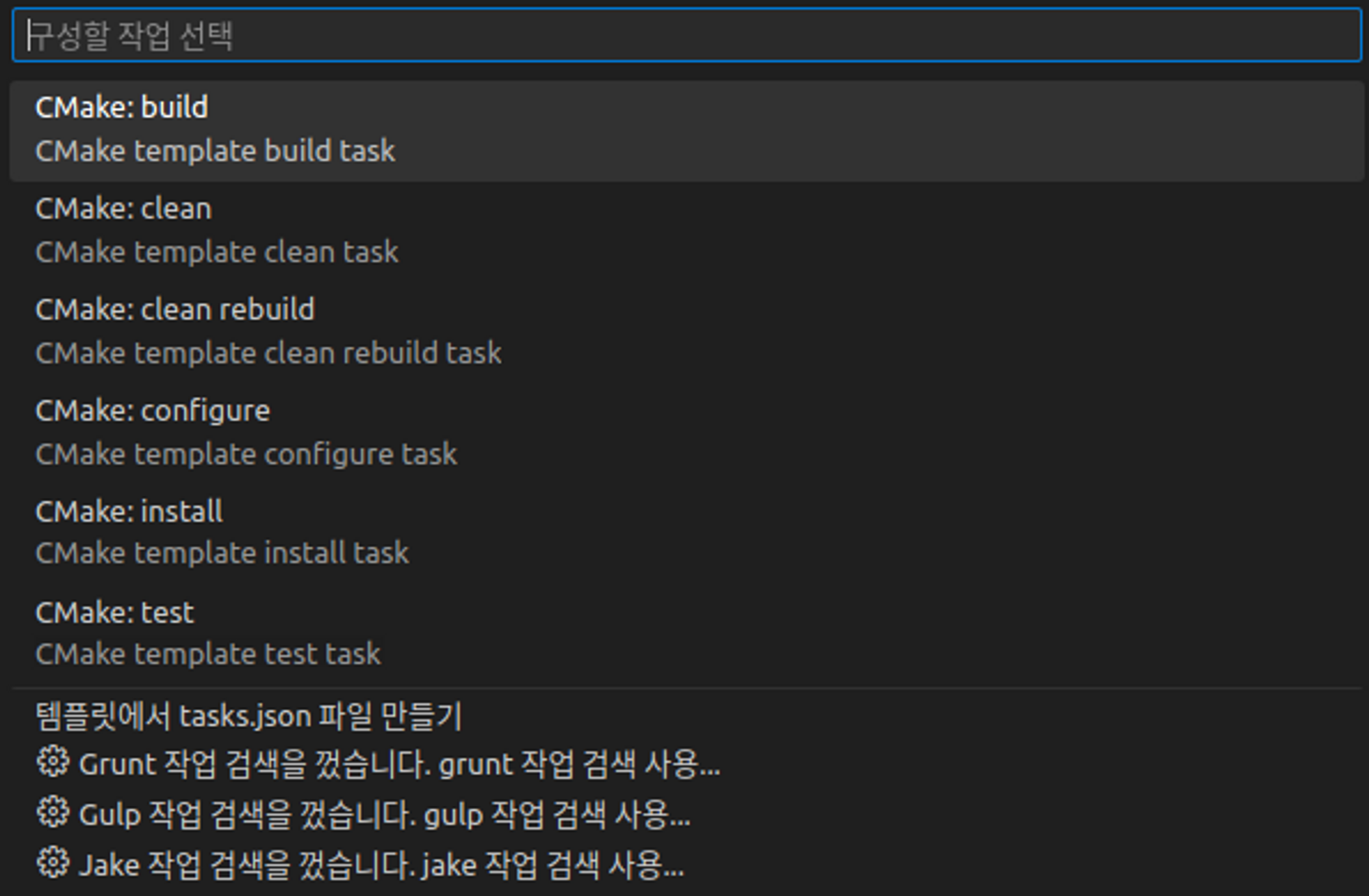
7. 템플릿에서 task.json 파일 만들기
- 터미널 → 작업 구성 → 템플릿에서 tasks.json 파일 만들기 → Others

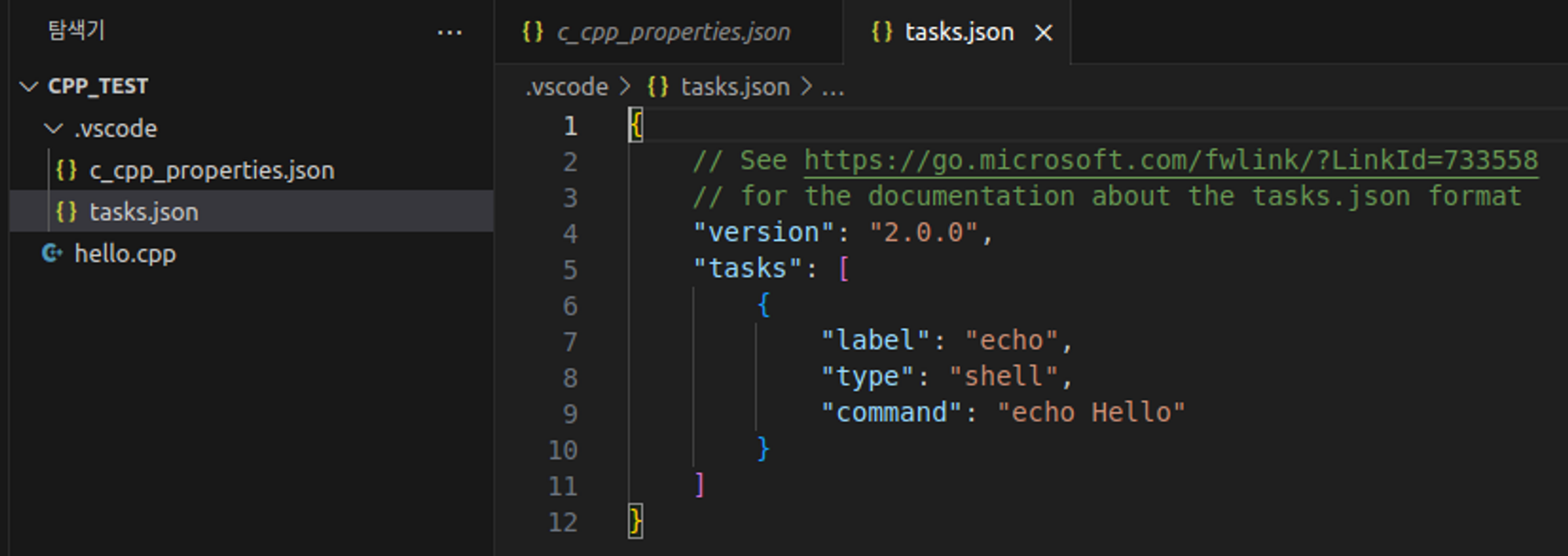
8. 코드 복사 수정
- tasks.json에 아래 내용 복사 붙여넣기
{
"version": "2.0.0",
"runner": "terminal",
"type": "shell",
"echoCommand": true,
"presentation" : { "reveal": "always" },
"tasks": [
//C++ 컴파일
{
"label": "save and compile for C++",
"command": "g++",
"args": [
"${file}",
"-o",
"${fileDirname}/${fileBasenameNoExtension}"
],
"group": "build",
//컴파일시 에러를 편집기에 반영
//참고: https://code.visualstudio.com/docs/editor/tasks#_defining-a-problem-matcher
"problemMatcher": {
"fileLocation": [
"relative",
"${workspaceRoot}"
],
"pattern": {
// The regular expression.
//Example to match: helloWorld.c:5:3: warning: implicit declaration of function 'prinft'
"regexp": "^(.*):(\\d+):(\\d+):\\s+(warning error):\\s+(.*)$",
"file": 1,
"line": 2,
"column": 3,
"severity": 4,
"message": 5
}
}
},
//C 컴파일
{
"label": "save and compile for C",
"command": "gcc",
"args": [
"${file}",
"-o",
"${fileDirname}/${fileBasenameNoExtension}"
],
"group": "build",
//컴파일시 에러를 편집기에 반영
//참고: https://code.visualstudio.com/docs/editor/tasks#_defining-a-problem-matcher
"problemMatcher": {
"fileLocation": [
"relative",
"${workspaceRoot}"
],
"pattern": {
// The regular expression.
//Example to match: helloWorld.c:5:3: warning: implicit declaration of function 'prinft'
"regexp": "^(.*):(\\d+):(\\d+):\\s+(warning error):\\s+(.*)$",
"file": 1,
"line": 2,
"column": 3,
"severity": 4,
"message": 5
}
}
},
// 바이너리 실행(Ubuntu)
{
"label": "execute",
"command": "${fileDirname}/${fileBasenameNoExtension}",
"group": "test"
}
// 바이너리 실행(Windows)
// {
// "label": "execute",
// "command": "cmd",
// "group": "test",
// "args": [
// "/C", "${fileDirname}\\${fileBasenameNoExtension}"
// ]
// }
]
}
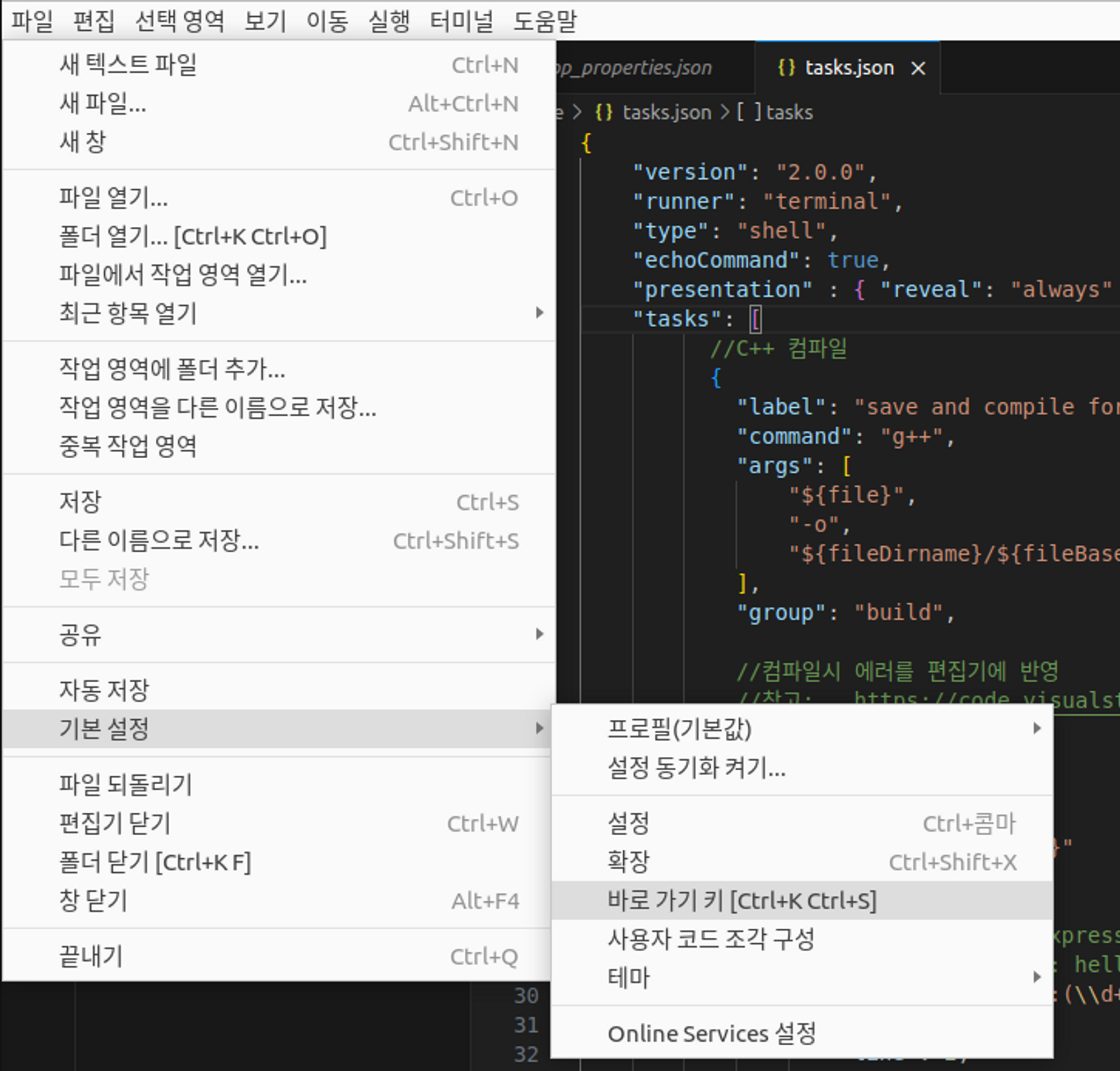
9. 단축키 설정
- 파일 → 기본 설정 → 바로 가기 키 [Ctrl+K, Ctrl+S]
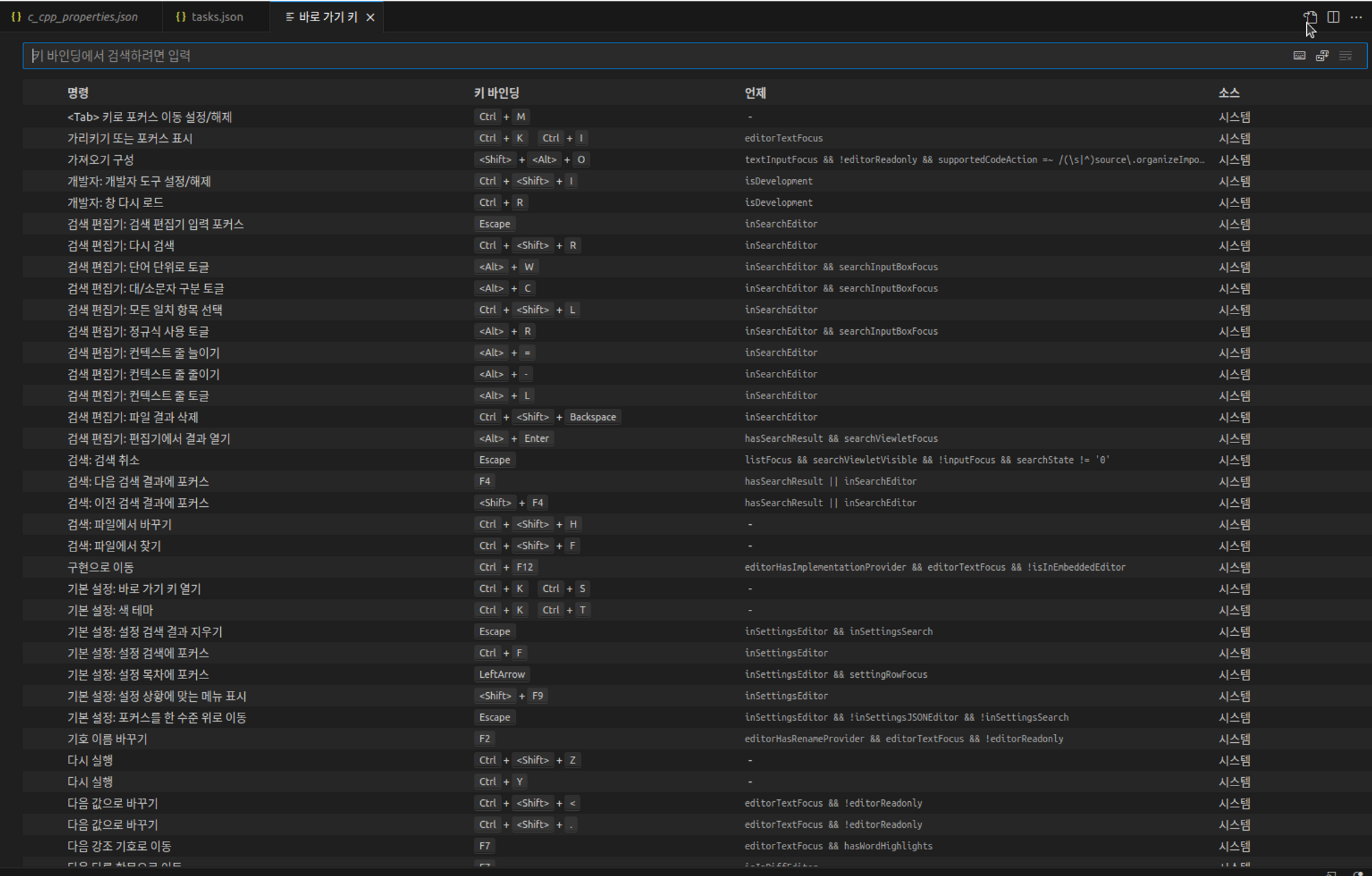
우측 상단 마우스 포인터가 가리키는 아이콘 클릭
빈 파일 확인
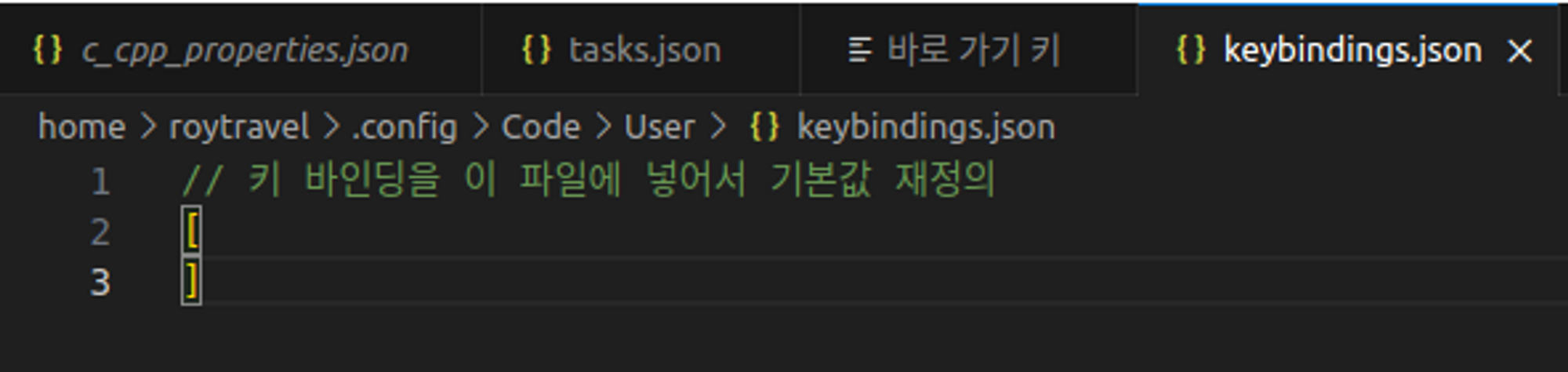
아래 내용 복사 붙여넣기
// 키 바인딩을 이 파일에 넣어서 기본값을 덮어씁니다.
[
//컴파일
{ "key": "ctrl+alt+c", "command": "workbench.action.tasks.build" },
//실행
{ "key": "ctrl+alt+r", "command": "workbench.action.tasks.test" }
]

Ctrl + Alt + C

save and compile for C++ 선택

Ctrl + Alt + R

이외에 ROS 개발 관련 VSCode Extension
- ROS
- URDF
- XML Tools
- YAML
- MarkDown All in one
- Highlight Trailing white spaces
'Computer Science > 로봇공학' 카테고리의 다른 글
| ROS2 launch 파일로 Gazebo와 Rviz2 실행하기 (0) | 2023.06.11 |
|---|---|
| Gazebo 시뮬레이션에서 world 파일 사용법 (1) | 2023.06.11 |
| Ubuntu 22.04에 OpenCV 설치하기 (2) | 2023.06.11 |
| Gazebo를 활용한 드론 시뮬레이션 실행 (0) | 2023.06.11 |
| Ubuntu 22.04에 ROS2 humble과 Gazebo 설치 (3) | 2023.06.10 |