1. PX4 소스코드 설치 및 Bash 스크립트 실행
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
cd PX4-Autopilot
bash ./Tools/setup/ubuntu.sh
2. Gazebo 시뮬레이터 설치
sudo apt-get install gazebo
3. Gazeo SITL 시뮬레이터 실행
make px4_sitl gazebo
- gazebo가 지원하는 기체 전체목록은 make list_config_targets 명령시 확인 가능
- 만약 위 명령을 수행했을 때 에러가 발생한다면 sudo apt-get upgrade gazebo 명령 필요

4. 드론 이륙 및 착륙 명령 실행
pxh> commander takeoffpxh > commander land
5. QGroundControl 설치
5.1 명령어 실행
sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libqt5gui5 -y
sudo apt install libfuse2 -y
5.2 QGC 바이너리 다운로드
5.3 QGC 바이너리 실행
chmod +x ./QGroundControl.AppImage
./QGroundControl.AppImage

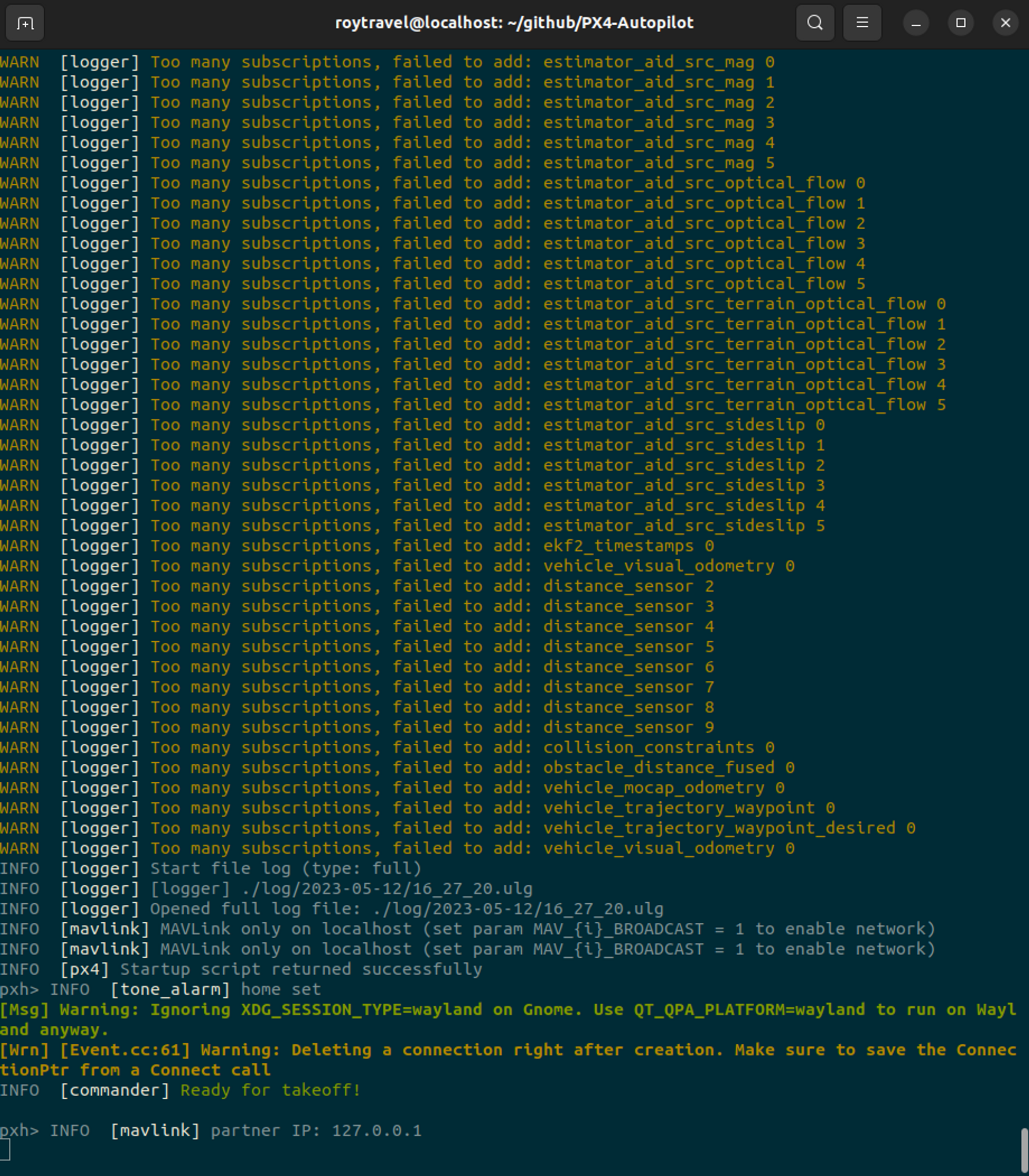
PX4와 QGC가 mavlink로 연결됨을 확인: INFO [mavlink] partner IP: 127.0.0.1
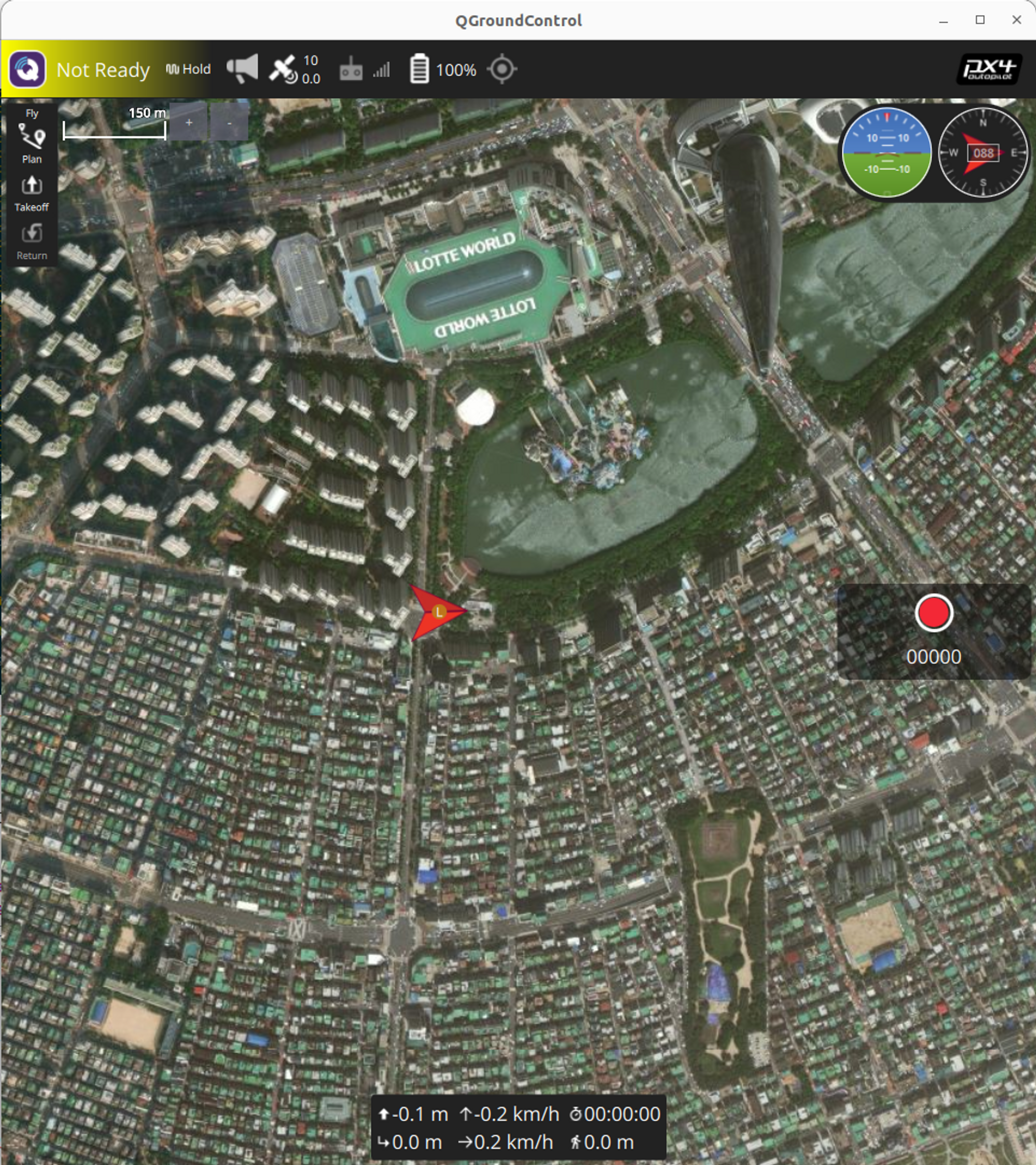
6. QGC의 시작 좌표 변경
- 아래 위치(석촌호수)를 .bashrc에 저장하여 터미널을 실행할 때 마다 설정되도록 내용 추가
export PX4_HOME_LAT=37.506700 #위도
export PX4_HOME_LON=127.097598 #경도
export PX4_HOME_ALT=15 # 고도
7. 시뮬레이션 속도 변경
- 실제 시간 대비 시뮬레이션 속도 증감 가능 (아래는 2배)
export PX4_SIM_SPEED_FACTOR=2
8. GUI 없이 Gazebo 실행
- 더 빠른 시뮬레이터 실행과 더 적은 리소스 사용
HEADLESS=1 make px4_sitl gazebo
- 환경변수로 등록하고 싶을 경우 아래은 내용을 .bashrc에 추가
export HEADLESS=1
Reference
[1] https://docs.qgroundcontrol.com/master/ko/getting_started/download_and_install.html
'Computer Science > 로봇공학' 카테고리의 다른 글
| ROS2 launch 파일로 Gazebo와 Rviz2 실행하기 (0) | 2023.06.11 |
|---|---|
| Gazebo 시뮬레이션에서 world 파일 사용법 (1) | 2023.06.11 |
| Ubuntu 22.04에 OpenCV 설치하기 (2) | 2023.06.11 |
| Ubuntu 22.04에 VSCode C++ 개발 환경 구축 (0) | 2023.06.11 |
| Ubuntu 22.04에 ROS2 humble과 Gazebo 설치 (4) | 2023.06.10 |